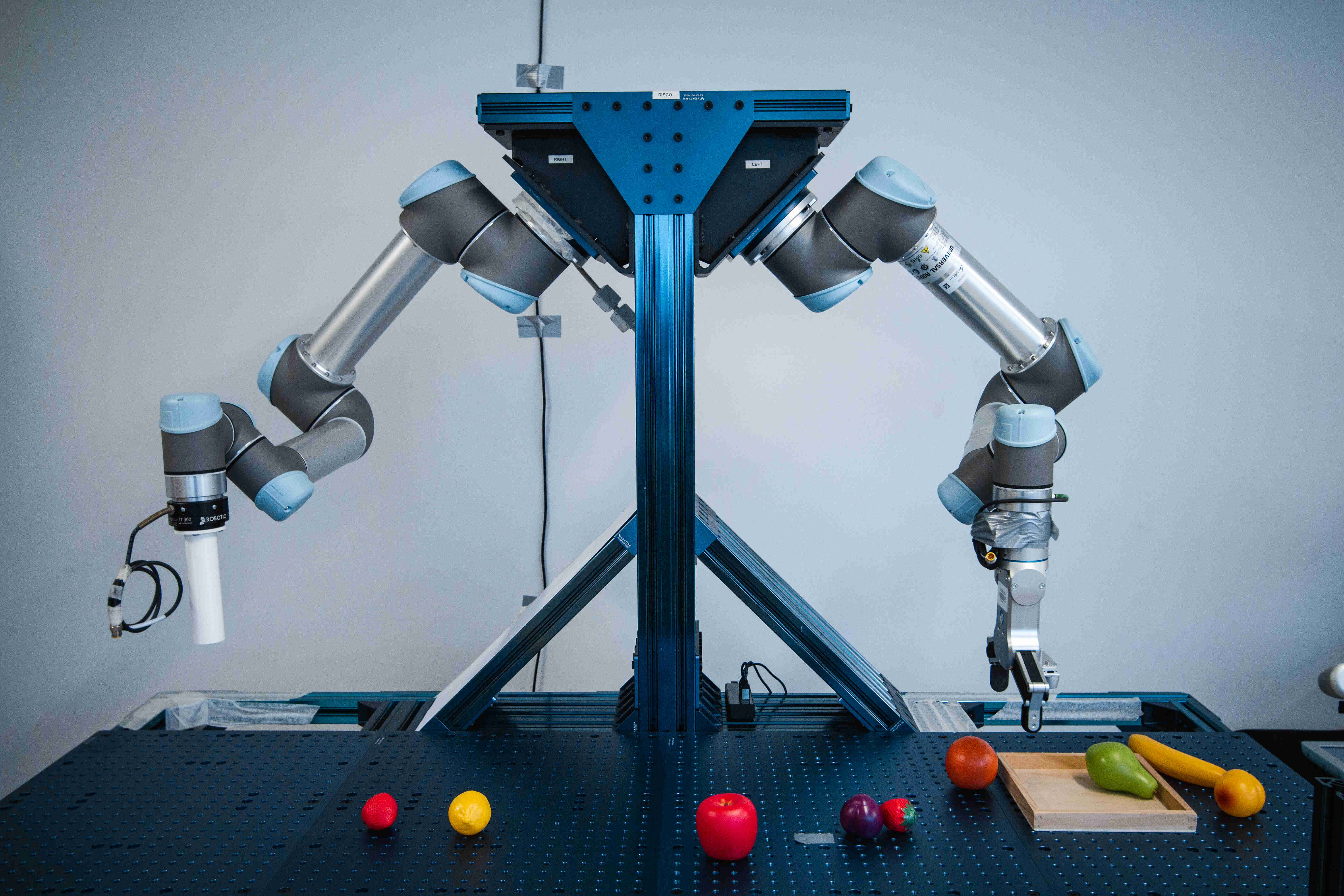
UR5 bi-manual setup
Overview:
- Precise position and velocity control
- Interchangeable grippers (parallel, tri-fingers, Allegro hand, ...)
- Embedded cameras and force-torque sensors on each wrist
- Rigid workbench and well modeled environment
- Highly customizable through large variety anchor points (for external cameras, objects, ...)
Main usages:
- Policy learning in controlled environments
| Publications |
|---|
| ViViDex: Learning Vision-based Dexterous Manipulation from Human Videos
Zerui Chen, Shizhe Chen, Etienne Arlaud, Ivan Laptev, Cordelia Schmid , 2024 |
| Towards Generalizable Vision-Language Robotic Manipulation: A Benchmark and LLM-guided 3D Policy
Ricardo Garcia, Shizhe Chen, Cordelia Schmid , 2024 |
| PolarNet: 3D Point Clouds for Language-Guided Robotic Manipulation
Shizhe Chen, Ricardo Garcia, Ivan Laptev, Cordelia Schmid CoRL, 2023 |
| Robust visual sim-to-real transfer for robotic manipulation
Ricardo Garcia, Robin Strudel, Shizhe Chen, Etienne Arlaud, Ivan Laptev, Cordelia Schmid IROS, 2023 |
| Instruction-driven history-aware policies for robotic manipulations
Pierre-Louis Guhur, Shizhe Chen, Ricardo Garcia, Makarand Tapaswi, Ivan Laptev, Cordelia Schmid CoRL, 2022 |
| Assembly Planning from Observations under Physical Constraints
Thomas Chabal, Robin Strudel, Etienne Arlaud, Jean Ponce, Cordelia Schmid IROS, 2022 |
| Monte-Carlo Tree Search for Efficient Visually Guided Rearrangement Planning
Yann Labbé, Sergey Zagoruyko, Igor Kalevatykh, Ivan Laptev, Justin Carpentier, Mathieu Aubry, Josef Sivic RAL, 2020 |
| Learning to combine primitive skills: A step towards versatile robotic manipulation
Robin Strudel, Alexander Pashevich, Igor Kalevatykh, Ivan Laptev, Josef Sivic, Cordelia Schmid ICRA, 2020 |
| Learning visual policies for building 3D shape categories
Alexander Pashevich, Robin Strudel, Igor Kalevatykh, Ivan Laptev, Cordelia Schmid IROS, 2020 |
| Learning to augment synthetic images for sim2real policy transfer
Alexander Pashevich, Robin Strudel, Igor Kalevatykh, Ivan Laptev, Cordelia Schmid IROS, 2019 |
Manipulation
Computer Vision
Machine Learning